Innovatia Laboratories
GMC601 Valve Controller
Description
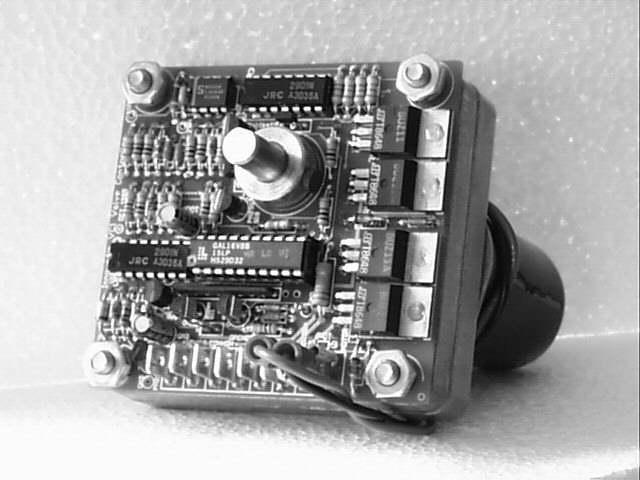
The GMC601 valve controller mounts on the gearbox of a 12 rpm, 40 lbf-in, 12 V gearmotor and couples to ball valves or other rotationaslly-actuated devices. A shaft coupler (not supplied) connects the valve stem to the gearbox shaft.
Ball valves used with cryogenic fluids (such as liquid oxygen) have a drain hole in the ball perpendicular to the main ball channel, to drain the channel to the valve exit when the valve is off. Bidirectional rotation is required to assure that the venting drain opens to the exit side of the valve.
The GMC601 direction command allows closing or opening the valve. When the commanded position has been reached, either the CLOSED or OPENED output is asserted, indicating completion of the command.
Use of the second enable command input results in both direction and on-off control capability required for a fluidic feedback loop.
Valve switching speed and torque are maximized by use of low-resistance, all n-channel, transistor switches.
Electrical Interface
The GMC601 has eight male 0.25 inch quick-disconnect electrical connectors for its electrical interface:
The motor leads should already be attached to terminals 7 and 8.
Proportional Control
Pin 8 of the PLD IC is the /ENABLE input. When held low, it commands the gearmotor to be on in the direction set by the O/C input.
Specifications
Mechanical Output
Rotational speed, 12 V supply, full load: 12 rpm.
Valve open/close time, quarter-turn: £ 1 s.
Full-load torque: 4.5 N-m or 40 lbf-in.
Mechanical Characteristics
Weight: 5.56 N or 1.25 lbf
Size: 102 ´ 70 ´ 76 mm or 4 ´ 2.75 ´ 3 inches
Output shaft: 7.94 mm or 0.3125 (5/16) in dia., slotted; 12.7 mm or 0.5 inch length.
Environmental Characteristics
Operating temperature range: - 40 to +70 ° C.
Relative humidity: non-condensing.
Power Supply Input: +12V(U), GND
Voltage input range: 10 V to 16 V between +12V(U) and GND.
Quiescent supply current: £ 0.1 A.
Maximum supply current (motor running while switching): £ 1.3 A.
Overvoltage transient protection: optional.
Undervoltage lockout: below 9 V, the system reset state is asserted. (See Operating States.)
Open/Close Command Input
O/C input CLOSE voltage: 0 - 1 V.
O/C input OPEN voltage: 3 V - 18 V.
Input resistance: > 10 kW .
State Outputs: OPENED, CLOSED
OPENED and CLOSED asserted-state output voltage: » voltage at COMMON terminal. If jumper J11 is installed (not broken), this is the voltage of +12V(U).
OPENED and CLOSED asserted-state maximum current: 200 mA. These outputs are overcurrent protected by 100 W series resistors.
OPENED and CLOSED unasserted-state outputs: 33 kW to GND in series with 100 W; 0 V out when unloaded.
Output Shaft Position Sensing
Position is sensed by two Hall-effect devices. U11 senses CLOSED position; U13 senses OPEN position. Each sense the polarity of one of the two magnets on the shaft collar. The two magnets are opposite in polarity and are NdFeB (Neodymium Iron Boron) high-coercivity button magnets.
Operating States
The PAL logic (U15) is programmed for six logic states which are output on pins 17 (/S1) and 18 (/S0) and 14 (/S2) of U15. Logic high (1) states and low (0) states are TTL compatible.
|
STATE |
/S2 |
/S1 |
/S0 |
NAME |
|
0 |
1 |
1 |
1 |
CLOSING |
|
1 |
1 |
1 |
0 |
CLOSED |
|
2 |
1 |
0 |
1 |
OPENING |
|
3 |
1 |
0 |
0 |
OPENED |
|
4 |
0 |
1 |
1 |
RESET |
|
5 |
0 |
1 |
0 |
MOTOR-REVERSAL DELAY |
Major rules of state change are:
1. If CLOSED and O/C goes high, go to OPENING. Rotate motor CW as viewed from gearbox shaft toward valve shaft.
2. If OPENING, go to OPENED if OPENED position sensor asserts. If O/C command goes low (close), go to DELAY and then to CLOSING.
3. If OPENED and O/C is goes low, go to CLOSING. If OPENED sensor unasserts, go to OPENING. Rotate motor CCW as viewed from gearbox shaft toward valve shaft.
4. If CLOSING, go to CLOSED if CLOSED position sensor asserts. If O/C command goes high (open), go to DELAY and then to OPENING.
Power reset causes the RESET state to be asserted. When it is unasserted, if the CLOSED or OPENED position sensor is asserted, the state will go to CLOSED or OPEN accordingly. If neither is asserted (valve is partially open), the CLOSING state is asserted next, causing the valve to be closed.
For CCW, H-bridge upper left (LU) and lower right (RL) MOSFETs are on; for CW (while OPENING), RU and LL MOSFETs are on. During current limiting (ILIM), all MOSFETs are off. Motor current limiting occurs at about 1.5 A.
![]()
![]()
![]()